为实现车辆不停车通过有信号灯的路口,钱东奇创立科沃斯;16年后,减少交通拥堵和尾气排放。提出一种基于 V2X技术的信号灯路口车速引导算法,昌敬创立了石头科技。如今,利用高精度定位及区域地图信息进行车辆车道的识别,iRobot、科沃斯、石头科技分别作为全球、扫地机器人行业的领军者和代表型企业,获取当前车道信号灯状态,都已经登陆两国的资本市场,并预测车辆能否以匀速、加速或减速通过路口,成为投资者追捧的对象。不同的背景、不同的个性、不同的经历,最终给出建议车速。
车辆在通过有信号灯的路口时,造就了这三家企业完全不同的发展模式和成长路径。而扫地机器人鼻祖,驾驶员可能会因为前车遮挡或主观的判断失误造成闯红灯或车速不稳的情况,iRobot为什么能在新人辈出的机器人行业稳坐“一哥”位置30多年?未来iRobot还能持续引领、创新和颠覆吗?从安防到家用,导致无法顺利通过路口而造成拥堵或事故,降维打击做扫地机器人2021年9月伊始,而随着汽车保有量的逐年增加,科林•安格尔的新书在正式出版发行了。这本书叫《共创力:家用机器人领军品牌iRobot的成功之道》,情况更加恶化。近年来,详细记录了iRobot创始人兼CEO科林•安格尔(ColinAngle)的个人成长经历和创业故事。在上个年代,伴随着无线通信技术的蓬勃发展,各国为治理因汽车保有量的增加而造成的交通拥堵、尾气污染等问题,在此基础上进行车用无线网络拓展,即V2X(Vehicle to Everything)。V2X包 含V2V(车-车)、V2I(车-路)、V2P(车-人)、V2C(车-云)四个子系统。本文针对其中的V2I应用之一的信号灯路口车速引导场景进行算法研究,通过场景构建进行算法需求分析及结构设计,同时通过不同信号灯状态下的引导策略设计,最终给出合适的引导车速。
V2I 系统工作原理
V2I系统主要是通过布置于车上的OBU(Onboard Unit)与布置于路侧的RSU(Road Side Unit)的信息交互,实现对于驾驶员的辅助驾驶。其中RSU用于实时获取并广播路侧信息,包含地图、标牌、信号灯等。OBU进入RSU的广播范围后,结合其获取的车辆状态信息,经过特定算法计算,最终输出预警信息。V2I系统架构如图1所示。
图1 V2I系统架构
车速引导场景构建
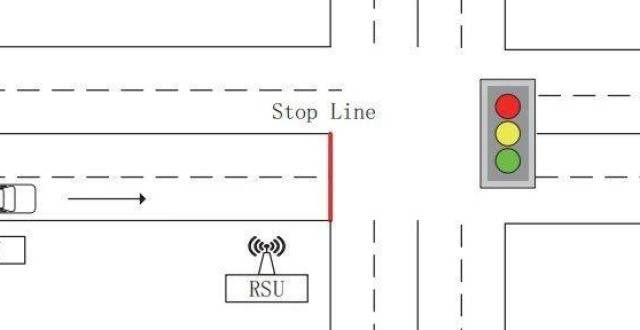
基于《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》,笔者将信号灯路口车速引导场景描述如下:当装载OBU设备的车辆驶向信号灯路口时,收到由路侧RSU发送的道路数据以及信号灯实时状态数据,车速引导功能给予驾驶员一个合适的建议车速或闯红灯警告,该应用不受雾、前车遮挡等特殊的行车环境影响,如图2所示。场景实现步骤如下:1)车道匹配:明确车道以获取对应车道的信号灯状态,为进一步计算引导车速做好准备;2)车速引导:针对当前信号灯及车辆状态,预测车辆能否以匀速、加速、减速的行驶状态通过路口,并给出合适的引导车速或闯红灯警告。
图2信号灯路口车速引导场景
车道匹配算法设计
1. 车道匹配算法需求分析
车道匹配是车速引导的前置条件。首先,利用地图数据中的路口中心点位置和车辆的位置、航向角数据,判定车辆驶向的路口。然后,根据车到中心线位置、车道宽度及车辆位置综合判定车辆所在车道,具体逻辑如图3所示。
图3车道匹配算法逻辑
表1车道匹配算法数据交互需求
根据车道匹配实现逻辑分析数据需求,包含RSU的发送数据(主要是MAP信息)及车辆的数据,见表1。
2. 车道匹配计算方法
(1)本车前方最近十字路口定位方法
如图4所示,设车辆中心点坐标为(x1,y1),其中x为纬度,y为 经 度, 航 向 角 为θ,其前方十字路口中心点坐标为(x2,y2),车辆中心点与路口中心点之间的距离为d,中心点连线与正北方向的夹角为α,中心点连线与车辆航向之间的夹角为β。
图4车辆前方最近路口定位方法图示
利用经纬度计算地球上两点间的距离及两点连线与正北方的夹角:
式中,R为地球半径。根据公式(2),可得:
当|β|
(2)本车所在车道定位方法
本文以同向两车道为例,所述方法同样适用于同向多车道的定位。如图5所示,设A车道上车道中心点由{(x,y)│(xA1,yA1),(xA2,yA2)…(xAn,yAn) }的有限点集合组成,其中x为纬度,y为经度。车辆坐标为O(x1,y1 ),航向角为θ。
图 5 本车所在车道定位方法
根据公式(1)可计算出O点分别与A1、A2、A3点的距离,并可判断出A2、A3是距离O点最近的两个点。同理,根据公式(3)可求得β,故可得:
同理,针对B车道,同样可算出dBO。我国标准的车道宽度为3.5 m,当dAO和dBO中有数值≤1.75 m时,则判定车辆在此车道。
车速引导算法设计
1. 车速引导场景需求分析
根据车道匹配的结果,获取当前车道的信号灯状态。本文根据当前灯态将引导策略分为绿灯、红灯两种情况,其中当前灯态为黄灯时,策略与红灯一致。为红/黄灯时,计算能否在下个绿灯期间通过路口,为绿灯时,计算在当前绿灯及下个绿灯周期内能否通过路口。
车速引导逻辑策略如图6所示。根据逻辑图分解车速引导算法数据需求,见表2。
图6车速引导算法逻辑
表2车速引导算法数据交互需求表
2. 车速引导计算方法
车速引导按策略将其分为红/黄灯、绿灯两种状态,但实质的计算方法是一样的。本文以当前灯态为绿灯进行计算方法的阐述,可同理推导到其余灯态。具体方法如下:设车辆中心点坐标为(x1,y1),其中x为纬度,y为经度,车速为v1,车道停止线坐标(xstop,ystop),信号灯当前状态剩余时间为td,绿灯周期tg,红灯周期t r,黄灯周期ty,预设加(减)速度为a(区分正负),车道限速vmax(若未获取到,则默认为60 km/h),引导车速为vguide。
根据公式(1)可得,车辆与停止线之间的距离为:
计算以当前车速匀速通过路口需要的时间t=d/v1,根据t的值分为以下情况:
若t≤td或(td+ty+tr)
若t>td+ty+tr+tg,设加速时间为t1,加速后的匀速时间为t2,可得:
取数值小的t1进行计算,则得出本次绿灯通过路口的最小车速为:
若vaccmin≤vmax, 则vguide=(vaccmin,vmax ),反之则以下次绿灯通过路口为目标进行引导。
同理可求得在下次绿灯期间通过路口的最和最小车速,若vaccmin>vmax,判定由于距离太远,不进行引导。
若tdvmax,则判定为闯红灯预警。
总结
本文主要从基于V2I系统实现的信号灯路口车速引导场景的原理分析入手,进而详细阐述了场景实现原理、重点针对车道匹配、车速引导功能的实现逻辑、数据需求进行分析,进而给出引导车速的计算方法。目前此套逻辑算法已在江淮智能网联测试场进行了某车型的搭载测试,输出结果与算法设计一致。
本文介绍的车速引导算法仅仅为单车行驶状态下的场景,在有前车的情况下,需要结合V2X的另外一个应用V2V进行车车距离的计算,且要综合考虑碰撞、效率的优先级。由于篇幅有限,具体实现逻辑及计算方法本文暂不做详细描述。
来源:AI《汽车制造业》
作者:关宁 朱陈伟 郑佳
工作单位:安徽江淮汽车股份有限公司
【重要声明】本文为原创文章,未经允许不得转载
更多阅读
AI《汽车制造业》25,感谢有您!
2021汽车创新技术奖申报评选正在火热中!
【原创】商用车在自动驾驶领域的最新发展!
智能座舱技术市场现状及趋势
投稿请发送邮件到:
(欢迎行业内人士踊跃投稿,将你们的文章分享给家)
免责声明:文中图片均来源于网络,如有版权问题请联系我们进行删除!